1. Polynomials drawing pictures
Algebraic geometry studies geometric shapes that arise as solution sets of polynomial equations. The simplest example is the most familiar:
The set of pairs satisfying this equation is a circle of radius one. We have written down a polynomial; it has carved out a curve. That move — from a single algebraic equation to the geometric object it defines — is the seed of the entire subject.
Generalization goes in two directions. More variables and more equations: the equation in three variables defines a sphere, and a pair of equations in three variables generically cuts out a one-dimensional curve, since each equation imposes one constraint and a generic pair imposes two. The second direction is to change the coefficient field. The rest of this article works over the complex numbers, because is algebraically closed — every nonconstant polynomial has as many roots as its degree, and the cohomological machinery we eventually need (Serre duality, derived categories of coherent sheaves, Bridgeland stability) is built on top of that fact. The pictures will continue to be drawn over , but the theorems live over .
A solution set of polynomial equations carved out inside — or, slightly more carefully, inside affine -space — is called an affine algebraic variety. The circle, the sphere, any cubic curve : all are affine varieties, each cut out as the zero locus of a single polynomial in its ambient space. Crucially, an affine variety is not a topological manifold patched from charts. It is a single algebraic object, defined by a single ideal in a polynomial ring, with a single coordinate ring . No gluing is required to define a sphere algebraically; the equation does all the work.
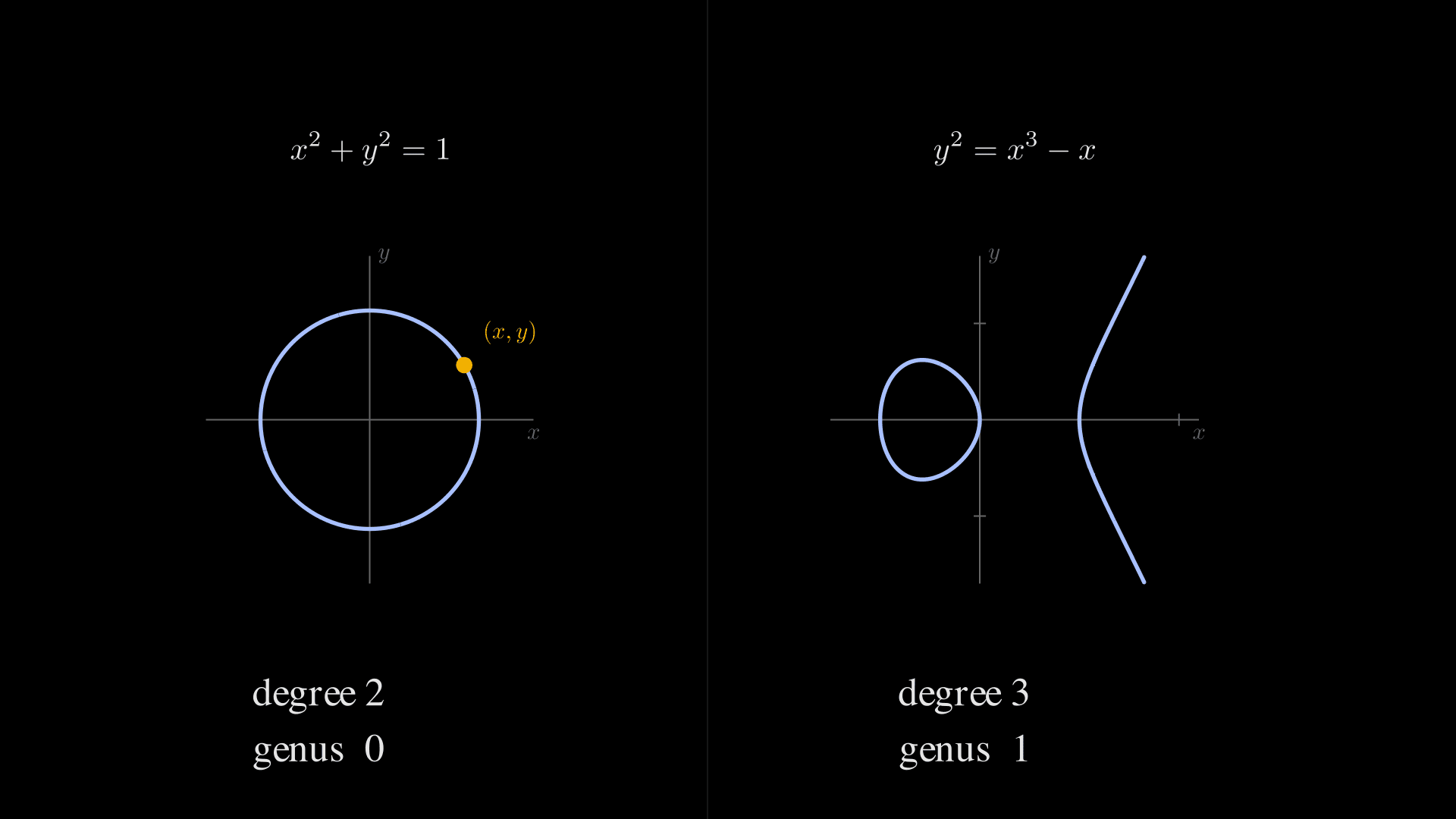
Two varieties at the foot of the subject. The circle is degree 2 and genus 0 — a sphere over , simple in every sense. The cubic is degree 3 and genus 1; over it splits into a closed oval and an unbounded branch, but the same equation over is a smooth torus. The pictures live in ; the theorems in this article live in , where degree-3 already means a hole.
The leap to the modern subject is forced by varieties that genuinely cannot be presented as a single affine piece. The canonical example is projective space : the space of one-dimensional linear subspaces of , parametrizing all "directions" through the origin. Projective space is proper — the algebraic-geometry analogue of compactness — and a basic theorem says that every global regular function on a connected proper variety is a constant. A closed subvariety of an affine space inherits the coordinate functions as global regular functions, and these are not all constant unless the subvariety is a single point. So for cannot be a closed subvariety of any : it has too few regular functions to fit. To work with it, you must build it from pieces — is glued from copies of affine -space along their overlaps, with explicit transition maps relating the homogeneous coordinates. Elliptic curves are projective varieties for the same reason; their group law and cryptographic structure depend on the point at infinity that affine charts on their own cannot see. Once you have one example that demands gluing, you give up trying to embed every variety in some and accept that varieties are objects built by patching affine pieces along common overlaps. The result is the notion of a scheme — a geometric object locally describable by polynomial coordinates, with global topology determined by the gluing data. A scheme is an instruction for gluing affine schemes; the affine ones are the building blocks, projective space is the reason you ever need to build.
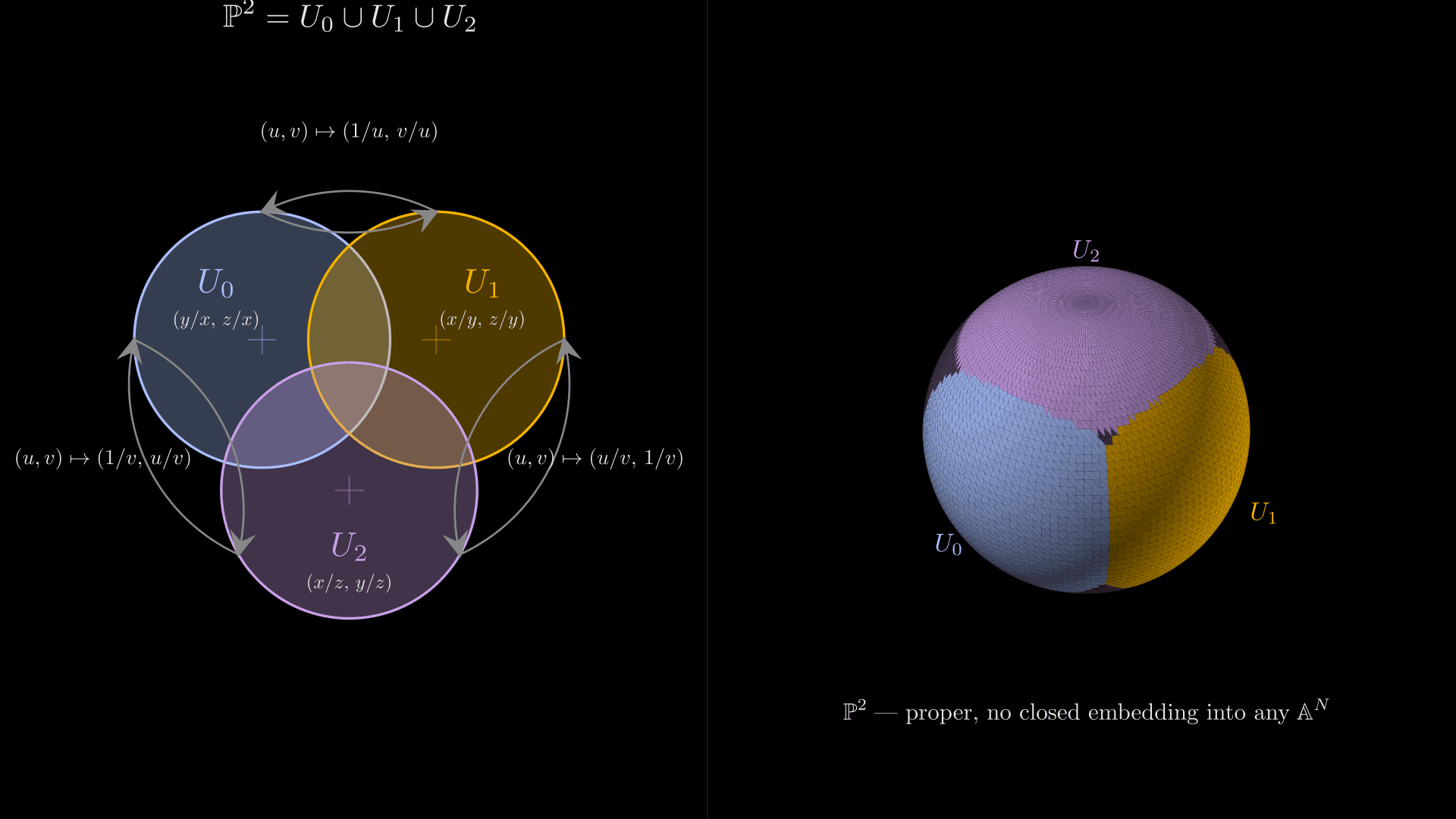
The standard open cover of by three affine charts , each with its own affine coordinates as ratios of the remaining homogeneous coordinates, glued along the pairwise overlaps by rational transition maps . Three flat -pieces plus three gluing rules produce a single proper variety with no closed embedding into any — the smallest example that forces algebraic geometry to leave the affine setting and adopt the scheme-theoretic viewpoint.
Once you have schemes, questions multiply: how do you classify them, when are two equivalent, what objects can live on them. Most of this article concerns objects that live on a particular kind of scheme — a smooth projective surface — and how the structure of such objects can become rich enough to ask categorical questions whose answers tell you something deep about the underlying geometry.
2. Enriques surfaces and a nineteenth-century counterexample
The Italian school — Castelnuovo, Enriques, Severi, and others working in Rome and Bologna in the late nineteenth and early twentieth centuries — set the program of classifying algebraic surfaces. A surface here means a complex algebraic variety of complex dimension two, or equivalently a four-real-dimensional space. The classification problem asked two questions: given two surfaces, can you tell whether one can be transformed into the other by birational maps (rational changes of coordinates invertible on a dense open subset)? And which surfaces are rational, meaning birational to projective space ?
Castelnuovo gave a clean criterion: a smooth projective surface is rational if and only if two cohomological invariants vanish:
A first encounter with cohomology
Throughout this article, expressions like appear as vector-space invariants of a variety and a sheaf on it. The reader who has not seen cohomology before can hold onto a single picture, accurate enough to navigate the rest of the article.
Cohomology is the operation you perform when you have a sequence of vector spaces and linear maps satisfying — every composition of two consecutive maps is the zero map. The -th cohomology is then the quotient of "things killed by the next map" by "things produced by the previous map." This single move — kernel of a square-zero operator modulo its image — is the universal pattern of cohomology, and it is pure linear algebra at heart.
For a variety and a sheaf , the groups apply this construction to a complex built from local sections of over an open cover. is the vector space of global sections — pieces of that exist consistently everywhere on . Higher measure obstructions: counts local-to-global glitches (data defined locally that cannot be glued into one global thing); measures obstructions of obstructions.
The reader who has seen vector calculus already knows a special case. A divergence-free vector field on a punctured plane that is not the gradient of any function — circulating around the puncture — represents a nonzero class in of the punctured plane: closed (killed by the next operator) but not exact (not produced by the previous one). Every flavor of cohomology in this article — sheaf cohomology here, the Ext groups in section 3, derived-category cohomology in section 4, and the BRST -cohomology of physics in section 5 — is a variation on this single theme.
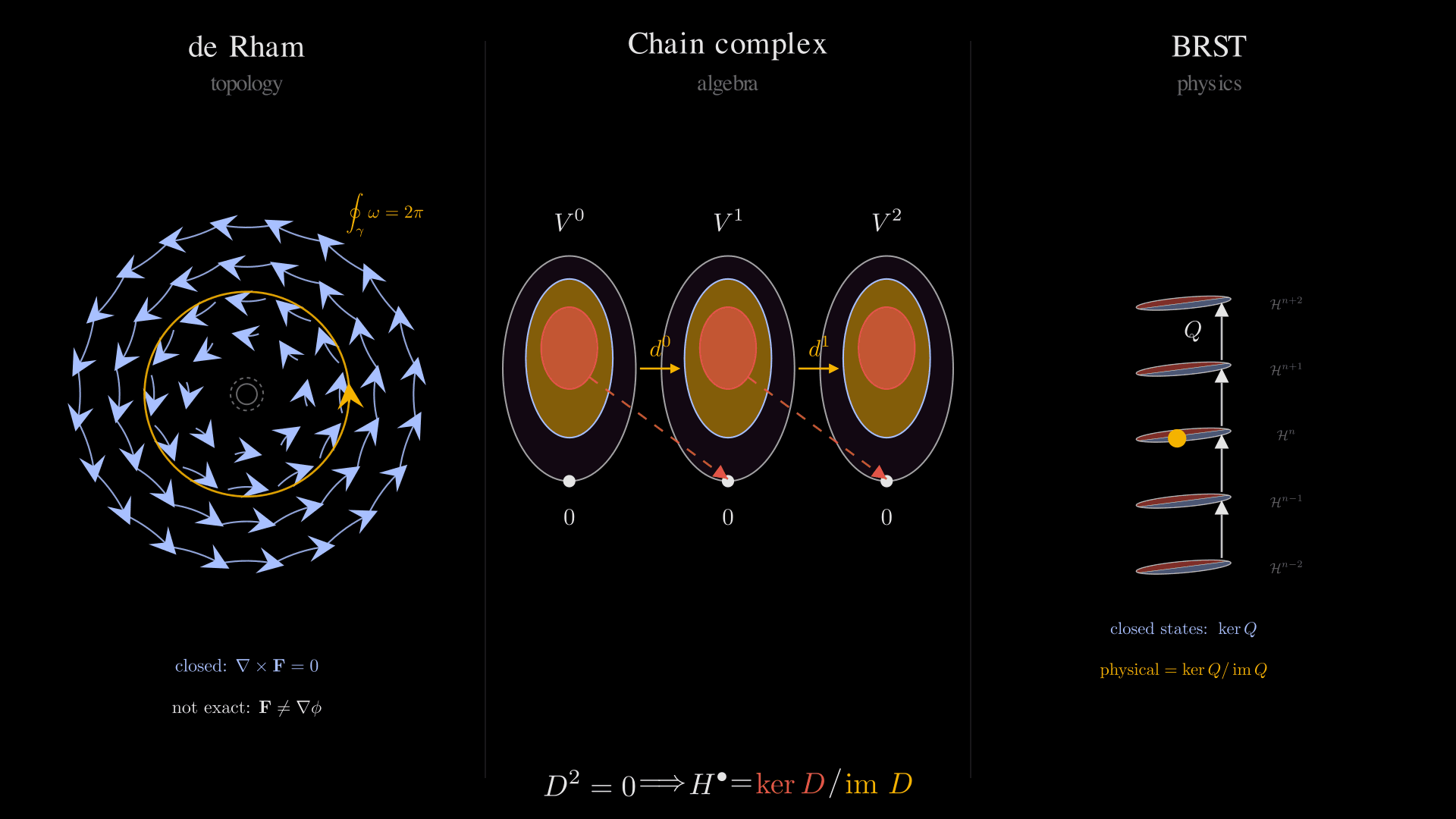
Three faces of the same operation. Left: a closed-but-not-exact 1-form on the punctured plane represents a nonzero de Rham class — the hole obstructs exactness. Centre: a chain complex with each column showing the nesting ; the gold annulus is the cohomology , and the dashed diagonals record . Right: a BRST ladder where physical states are kernel-modulo-image of a nilpotent supercharge . All three compute the same quotient for an operator with — vector calculus, homological algebra, and quantum field theory pulling on a single piece of linear algebra.
Here is the canonical line bundle (the bundle of top-degree differential forms) and is the structure sheaf, both finite-dimensional complex vector spaces once you take their cohomology. Concretely, is the space of holomorphic top-forms on ; measures local-to-global obstructions for holomorphic functions and is harder to describe elementarily, but the Aside above gives the universal picture. The number is the geometric genus; is the irregularity. Castelnuovo's criterion says that vanishing of these two numbers is necessary and sufficient for to be rational, provided you also know the surface is regular — which in this situation turns out to be implied.
Enriques produced a counterexample. He constructed a smooth projective surface — now called an Enriques surface — for which holds but the surface is not rational. His original construction was a sextic surface in passing with multiplicity two through the six edges of the coordinate tetrahedron; the smooth model of that singular surface gave the new example. Vanishing of and does not in itself force rationality — the Enriques surface filled the loophole that Castelnuovo's criterion left open, and it was the first hint that the classification of surfaces was finer than the classification of curves.
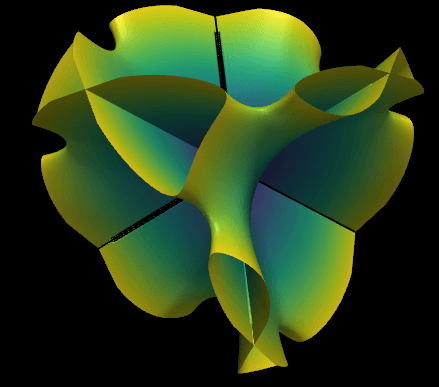
A real slice of Enriques' classical sextic, the canonical Wikipedia/Endrass form at . The actual Enriques surface lives in ; this real cross-section makes the singular locus along the tetrahedron edges visible as sharp creases between the curved sheets.
The modern definition is cleaner. Over — and more generally over any algebraically closed field of characteristic different from — a smooth projective surface is an Enriques surface if it is minimal (no -curves to blow down), satisfies , and has canonical bundle that is two-torsion:
The non-triviality of is what saves Enriques surfaces from being rational; the two-torsion is what makes them distinctive among all surfaces with vanishing and . Everything in this article runs over , so this is the working definition from here on.
A smooth projective minimal complex surface with and but .
The characteristic-free definition, and why characteristic 2 is special
The condition with implicitly assumes that the order-two element of corresponding to is carried by the constant group scheme . Over a field of characteristic this is automatic — there is nothing else for it to be. In characteristic , the same order-two class can be carried by an infinitesimal group scheme — or — and when it is, the canonical bundle becomes trivial, , with rather than . These are the singular and supersingular Enriques surfaces; they are bona fide members of the family by every modern test, but our definition above silently excludes them.
The robust formulation, due to Bombieri and Mumford, replaces " two-torsion" with the numerical condition that is numerically trivial, together with and . In characteristic this recovers exactly the definition above; in characteristic it also catches the two extra families. None of the arguments in this article touch characteristic , so the cleaner complex-analytic formulation is what we use.
The two-torsion has a concrete geometric consequence. Whenever a line bundle on a smooth variety squares to the trivial bundle, you can build an unramified double cover of the variety. For an Enriques surface this cover is itself smooth, and it turns out to be a K3 surface — a simply connected surface with trivial canonical bundle and nonzero . An Enriques surface is therefore a K3 surface modulo a fixed-point-free involution; the K3 cover carries strictly more cohomology than the quotient.
where is the deck involution. Enriques surfaces inherit pieces of K3 structure, but only in quotient form, and a great deal of the subject consists of tracking what survives.
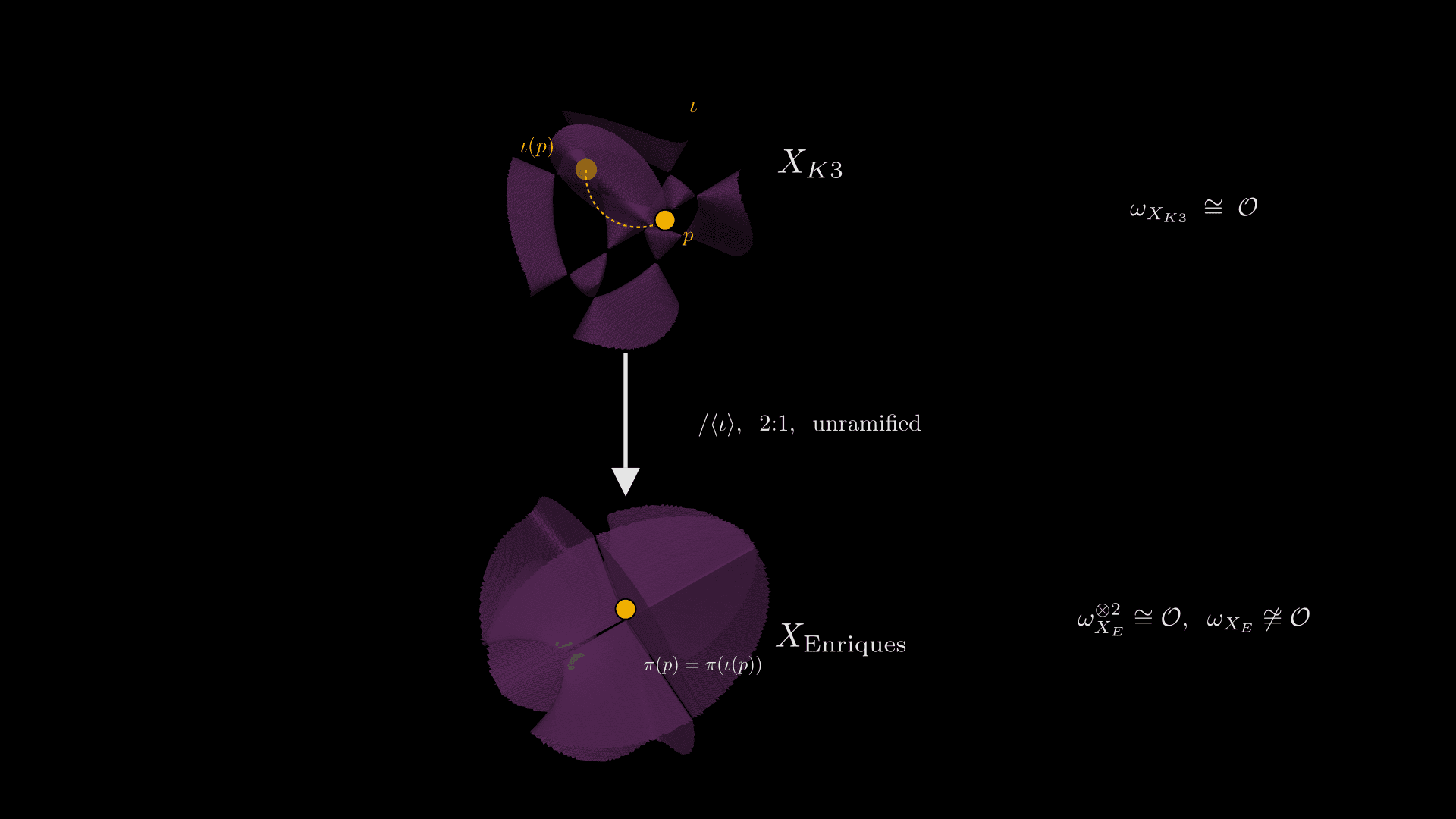
The K3 double cover, made tangible. An antipodal pair on the Kummer K3 descends to a single point of the Enriques quotient — a unramified cover. Under the descent stays trivial while becomes nontrivial 2-torsion. (Real slices of objects that live over .)
An Enriques surface can, but need not, contain rational curves. A smooth rational curve on a surface has self-intersection , because it is a smooth embedded with normal bundle ; such curves are called -curves. A generic Enriques surface contains none at all — these are called unnodal or generic, and they are the cleanest representatives of the family.
The unnodal hypothesis is not a side-condition. It is what makes the Kuznetsov component, defined later, admit a completely orthogonal exceptional collection of ten line bundles. Without it, those line bundles still exist and are still exceptional, but they fail to be orthogonal, and the categorical picture becomes considerably messier. The proof at the end of this article uses unnodality essentially.
3. Vector bundles and coherent sheaves
To do anything with a variety beyond classifying it up to isomorphism, you put stuff on it. The most basic stuff is a vector bundle: a continuous (in our case, holomorphic and algebraic) family of vector spaces parametrized by the points of the variety. The tangent bundle of a smooth variety assigns to each point the tangent space there; the canonical bundle assigns to each point the one-dimensional space of top-degree differential forms. A line bundle is a vector bundle whose fibers are one-dimensional.
The algebraic way to package a vector bundle is as a locally free sheaf: a sheaf on such that on each small open subset , the sections form a free module over the ring of regular functions . "Locally free" expresses the bundle's local triviality; the global structure is captured by how the local trivializations glue.
This is enough for many purposes, but the category of vector bundles has a fundamental defect: it is not abelian. A morphism of vector bundles is a fiberwise linear map, and the kernel and cokernel can fail to be vector bundles — because the rank of the map can jump at certain points. Take a map given by multiplication by a section vanishing along a curve; the cokernel is supported on that curve, where it is one-dimensional, and zero everywhere else. A "vector space that vanishes outside a subvariety" is not a vector bundle.
To fix this we generalize. The right object is a coherent sheaf — and on the schemes we care about, the working description is that a coherent sheaf is, locally, the cokernel of a map between two free -modules of finite rank. This local-cokernel condition is what is technically called finitely presented; it agrees with coherence on a Noetherian scheme, and every variety considered in this article is Noetherian. Coherent sheaves form an abelian category: kernels and cokernels stay coherent, and exact sequences make perfect sense. Vector bundles sit inside the coherent sheaves as the locally free sheaves of finite rank, but they are no longer the only objects.
Let be a Noetherian scheme. A sheaf on is coherent if every point has an open neighborhood such that is the cokernel of a morphism between free sheaves of finite rank. (On non-Noetherian schemes the definition splits from finite presentation; we will not encounter that subtlety.) Coherent sheaves form an abelian category .
A skyscraper sheaf supported at a point assigns the field to any open set containing and zero to any open set not containing . It is coherent — locally it is the cokernel of the inclusion of the maximal ideal — but not locally free, because its rank jumps from one to zero as you move off the point. An ideal sheaf of a subvariety consists of regular functions vanishing along ; it is the kernel of the surjection , and it is coherent and torsion-free, but not locally free unless is a divisor (a codimension-one subvariety—like a curve on a surface—that is locally defined by a single function).
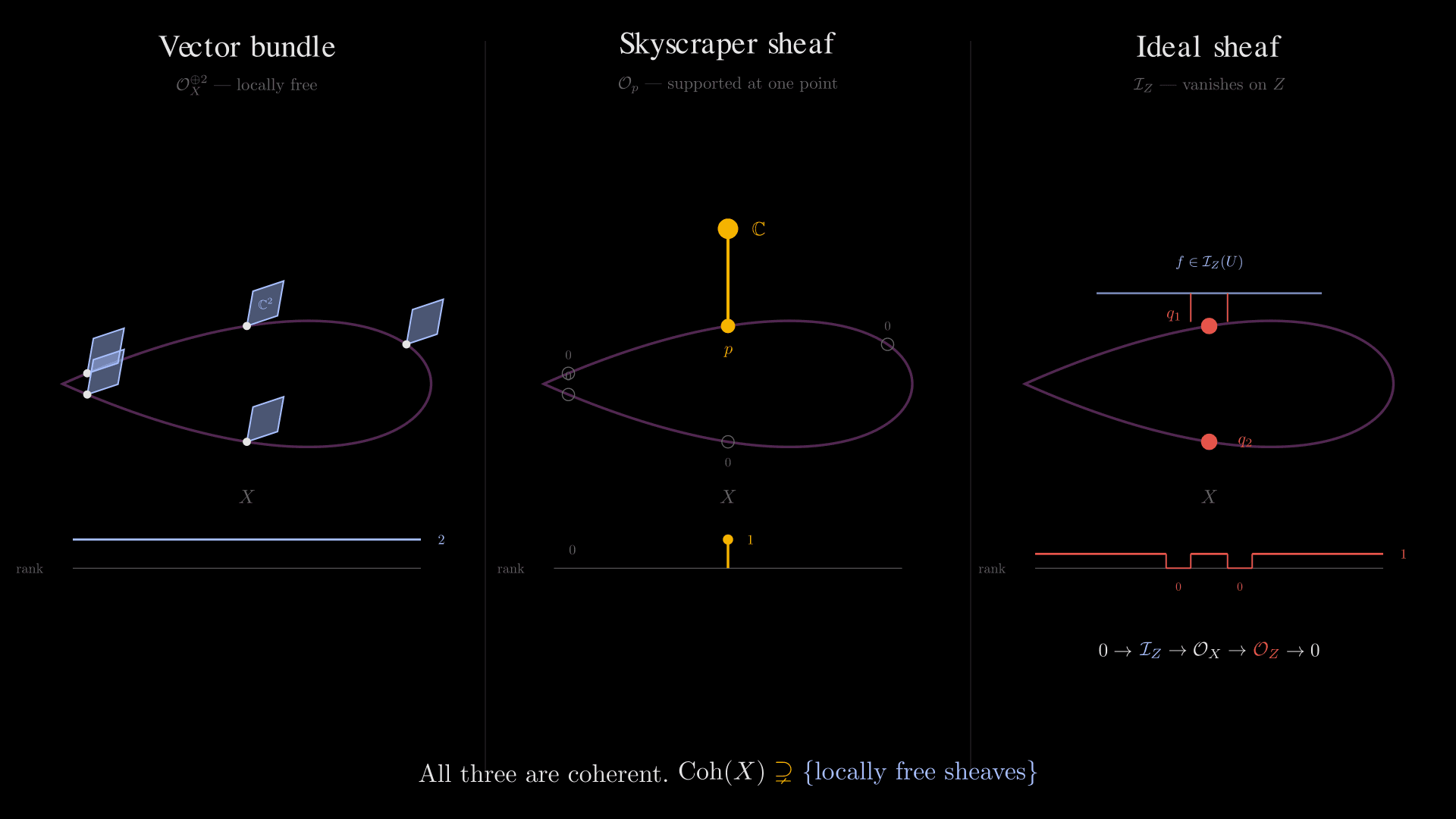
Three sheaves on the same base curve — all coherent, but only the leftmost is locally free. The rank-function strip beneath each panel is the algebraic-geometry-native witness: constant 2 for the vector bundle, a delta spike at for the skyscraper , and generically 1 with downward notches on for the ideal sheaf . Coherent sheaves form an abelian category, , that strictly contains the vector bundles — and the bigger category is exactly the room you need for the kernel of , the cokernel of multiplication by a vanishing function, and every other construction where the rank refuses to stay constant.
These are exactly the sheaves that physicists call -branes (skyscrapers) and -branes wrapping cycles (ideal sheaves), as we will see in section 5. The fact that contains them all on equal footing is what makes it the right setting for both algebraic geometry and string-theoretic D-brane computations.
4. Complexes and the derived category
Coherent sheaves are abelian, but still not enough. For deeper invariants — cohomology, derived functors, the homological invariants that appear in moduli problems — you need to consider not just individual sheaves but complexes of sheaves.
A complex of coherent sheaves is a sequence
where the morphisms compose to zero, . This is the same square-zero condition we just met in the cohomology Aside of section 2, now applied to bundle-like objects rather than abstract vector spaces; the differential is a morphism of sheaves, but the formula behind every flavor of cohomology in this article is the same. The cohomology of the complex at degree is , again a coherent sheaf. A complex is bounded if only finitely many of the are nonzero. The whole machinery of homological algebra rests on the recognition that the complex carries more information than its cohomology, but the appropriate equivalence relation makes complexes indistinguishable when they have the same cohomology.
That equivalence relation is quasi-isomorphism: a morphism of complexes inducing an isomorphism on every cohomology group. The bounded derived category of coherent sheaves, , is the category of bounded complexes with quasi-isomorphisms formally inverted. An object of is a bounded complex; a morphism is a "roof" where the left arrow is a quasi-isomorphism. Coherent sheaves embed into as complexes concentrated in a single degree.
The derived category has two structural features distinguishing it from an abelian category. First, the shift functor translates a complex one position to the left:
It is invertible, with inverse , and applying repeatedly gives an action of on . Second, short exact sequences of complexes get replaced by distinguished triangles:
A distinguished triangle is the derived-category analogue of a short exact sequence. Long exact sequences in cohomology come out of distinguished triangles, and most structure theorems of algebraic geometry translate naturally into this language. The derived category equipped with its shift and its distinguished triangles is the prototypical example of a triangulated category, the abstract setting for the rest of this article.
![A two-region figure on a black background. Left region (heading 'Complex', subtitle $d^{i+1}\\circ d^i = 0$): two horizontal rails of deep-purple labelled boxes. The upper rail reads $\\cdots \\to \\mathcal{E}^{-1} \\to \\mathcal{E}^0 \\to \\mathcal{E}^1 \\to \\mathcal{E}^2 \\to \\cdots$ with white arrows carrying $d^{-1}, d^0, d^1$ labels and red ×'s above each consecutive pair recording the chain-complex relation. The lower rail is the same chain shifted right by one box-pitch, with sign-flipped differentials $-d^i$ in white; an amber brace on the left ties the two rails together with a $[1]$ label, identifying the lower rail as $\\mathcal{E}^\\bullet[1]$. Right region (heading 'Distinguished triangle', subtitle 'shift closes the cone'): a roughly equilateral triangle with vertices in three matched colors — blue $\\mathcal{E}^\\bullet$ at lower-left, amber $\\mathcal{F}^\\bullet$ at lower-right, violet $\\mathcal{G}^\\bullet \\cong \\mathrm{Cone}(f)$ at the apex; solid white edges $f$ along the bottom and $g$ on the right, plus a dashed amber edge $h$ closing the triangle from $\\mathcal{G}^\\bullet$ down to a point just outside the lower-left vertex labelled $\\mathcal{E}^\\bullet[1]$, indicating the shift. Bottom unifier banner: '$D^b(X)$ is triangulated: $[1]$ shifts and distinguished triangles close the cone.', with $[1]$ in amber and 'distinguished triangles' in violet.](/_next/image?url=%2Fimages%2Fposts%2Fenriques-kuznetsov-stability%2FDerivedCategory.png&w=3840&q=75)
The two structural data of a triangulated category, side by side. On the left, a bounded complex of coherent sheaves with the chain-complex relation (the red ×'s) and the shift functor acting by sliding the whole chain one position; the sign flip on the differentials is the small piece of bookkeeping that makes the shift an honest endofunctor. On the right, the derived-category replacement for a short exact sequence: a distinguished triangle , with realised as the mapping cone of and the closing edge landing in the shifted . Long exact sequences in cohomology fall out of these triangles; together with the shift, they make the prototypical triangulated category — the abstract setting for everything that follows.
Let be a smooth projective variety of dimension over . There is a functor , the Serre functor, given by satisfying a natural perfect pairing . Equivalently, in form: for ,
The Serre functor is the categorical incarnation of Serre duality — and it is the operator whose interaction with stability conditions will produce our final contradiction. For an Enriques surface, and is two-torsion, so
The Serre functor squares to the homological shift by four. On a K3 surface the Serre functor is just (because ), so it commutes with everything; on an Enriques surface it carries genuine torsion information — which is why the Enriques case is rigid in a way the K3 case is not.
Two bookkeeping consequences for — the abstract Grothendieck group whose elements are formal -linear combinations of coherent sheaves modulo short exact sequences — will be used repeatedly. First, a distinguished triangle gives the additivity relation in . Second, the class of a bounded complex equals the alternating sum of the classes of its cohomology sheaves:
This recipe is what converts the cohomology-sheaf description of a complex into a numerical class — it will land the final contradiction in section 8.
Why does any of this matter? The mathematician's answer is the homological algebra of varieties. The physicist's answer is more striking — and it is what convinced algebraic geometers they were studying the right object.
5. B-branes, the topological string, and Q-cohomology
There is a question that mathematicians of the 1990s could not have answered cleanly without help from physics: why is the derived category of coherent sheaves the right invariant of an algebraic variety, rather than just the abelian category of coherent sheaves? Coherent sheaves are abelian, geometrically natural, and sufficient for many purposes. What forces us to enlarge them to a triangulated category?
The answer came from a class of two-dimensional quantum field theories called topological string theories. The story begins with the type II superstring on a Calabi-Yau target, but you can read what follows as a structural argument that any reasonable notion of "what lives on " forces you to the derived category — even without committing to string theory.
$Q$-cohomology: cohomology in physics
Before diving into topological strings, a physical analogy worth pinning to the cohomology Aside in section 2.
In quantum field theories with a fermionic gauge symmetry, one frequently has a square-zero operator acting on the Hilbert space of states: . Physical states are taken to be elements of — states "-closed" in the sense of being annihilated by — modulo elements of , which are deemed gauge-equivalent to zero. The space of physical states is therefore This is exactly the cohomology construction we have been using. The operator plays the role of the differential ; the condition is the same as ; "physical states modulo gauge" is "kernel modulo image."
The classic prototype is electromagnetism. The gauge transformation is the image of an exterior derivative, the physical field strengths are the closed forms, and the gauge group of -fields modulo gradients is, on a topologically nontrivial spacetime, exactly the de Rham cohomology of that spacetime. The BRST formalism systematizes this: any time you have a gauge symmetry, you can construct a such that and physical states are -cohomology classes.
In the topological string below, is one of the worldsheet supercharges, promoted to a scalar by the topological twist. Open-string states between two D-branes will turn out to be -cohomology groups, and we will see that mathematically these are the Ext groups — yet another flavor of the same kernel-mod-image construction, now applied to coherent sheaves. The thread "cohomology equals kernel mod image of a square-zero operator" runs through every formal object in this article.
A Calabi-Yau threefold supports a sigma model with supersymmetry on the worldsheet. Witten's topological twist of this theory comes in two flavors, the A-twist and the B-twist, distinguished by which combination of worldsheet supercharges you promote to a worldsheet scalar. The B-twist is consistent precisely when , the Calabi-Yau condition. After twisting, one supercharge becomes a worldsheet scalar nilpotent operator , the BRST operator, satisfying
Physical observables are -cohomology classes — equivalence classes of states satisfying ("-closed") modulo states of the form ("-exact"). This is the same kernel-mod-image computation as in section 4; the BRST operator is the , and physical states are the cohomology in the linear-algebra sense above. Correlation functions in the B-model depend only on the complex structure of and not on its Kähler structure. The closed-string state space is the Dolbeault cohomology , packaged more invariantly as the Hochschild cohomology of .
The question sharpens when you allow worldsheets with boundary — which physicists must, because that is what describes open strings ending on extended objects called D-branes.
A worldsheet with boundary needs boundary conditions to make the variational problem well-posed. Witten's analysis of B-model boundary conditions shows that they amount to a choice of complex submanifold of together with a holomorphic vector bundle on it. The conclusion: a B-brane is a holomorphic vector bundle on , and the open-string spectrum between two B-branes and is
The right-hand side is a finite-dimensional complex vector space — the Ext groups of and . For , is just the linear bundle maps from to ; for higher , measures "-step extensions" of by and is itself an instance of the kernel-mod-image construction we have been tracking. The cohomology groups from section 2 are the special case — Ext is a generalization of cohomology, with the structure sheaf in the first slot replaced by an arbitrary sheaf. The open-string ghost number matches the homological degree, and the worldsheet -cohomology of operators between branes lands exactly on this .
That would be satisfying if it were complete, but three physical phenomena push the formalism further. Singular branes: a D-brane wrapped on a point (a "-brane") is a skyscraper sheaf, not a bundle, and a brane consisting of an ideal sheaf of a subvariety is a coherent sheaf that is not locally free. Anti-branes: a brane and its anti-brane have opposite orientations, so you need formal additive inverses. Tachyon condensation: a brane and antibrane with an open-string tachyon can decay to a bound state, and Sen's tachyon condensation analysis identifies that bound state with the mapping cone — a complex of branes, not a single brane. Multi-step bound states give complexes of arbitrary length.
Coherent sheaves handle the first phenomenon. Triangulated structure — shifts, cones, quasi-isomorphism as gauge equivalence — handles the second and third. The natural closure of "holomorphic bundle" under these physical operations is exactly .
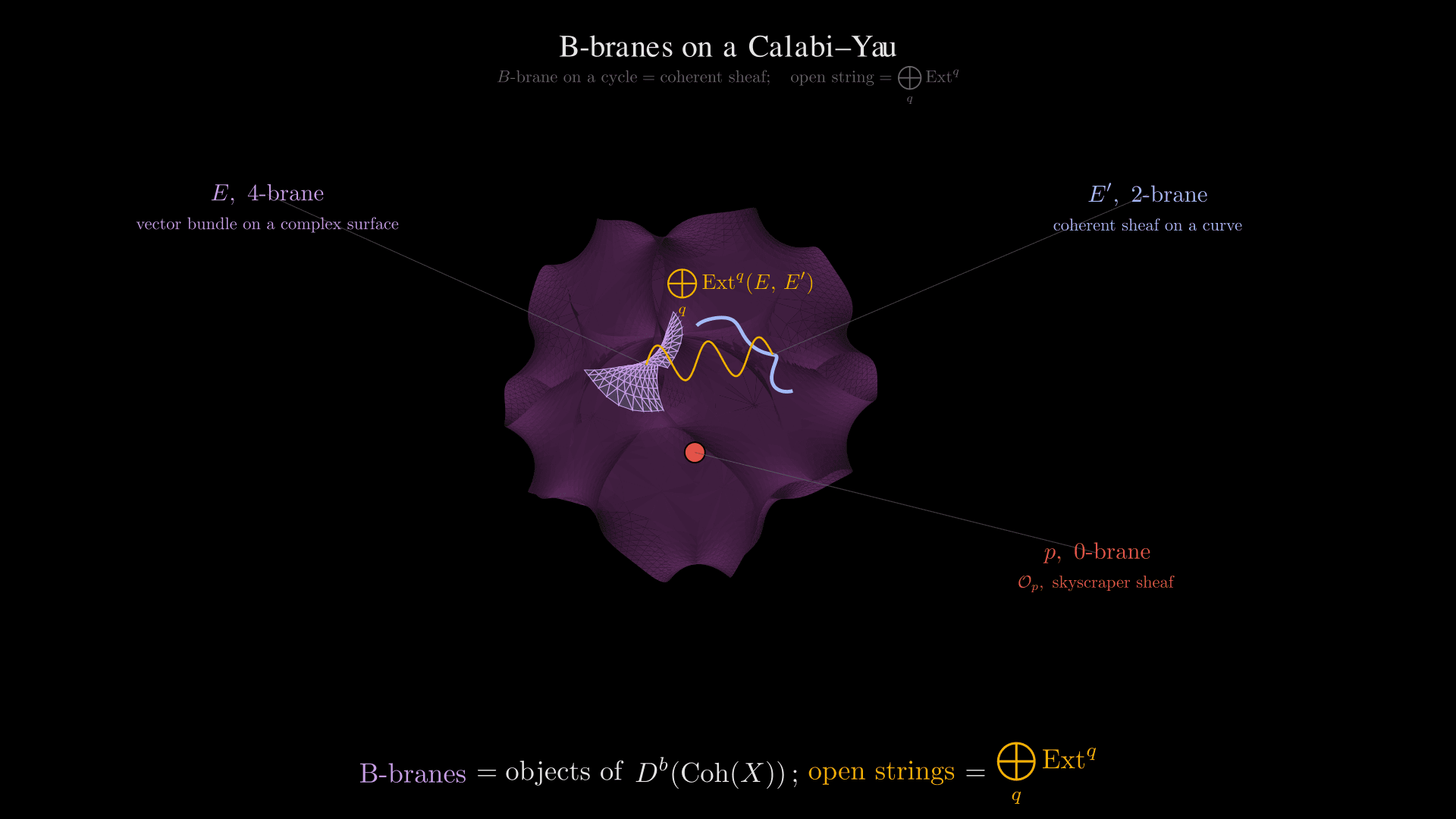
B-branes on the Hanson cross-section of the Fermat quintic Calabi–Yau threefold. Three branes wrapping cycles of complex dimensions — a vector bundle on a complex surface, a coherent sheaf on a curve, a skyscraper sheaf at a point — with the amber open-string mode stretched between and representing a class in . The figure makes the physics-to-algebra dictionary concrete: every brane is a coherent sheaf on , every open-string spectrum is an Ext group, and the closure of "holomorphic bundle" under tachyon condensation and anti-branes is precisely — Douglas's 2001 proposal, made visible.
Douglas's 2001 proposal is that the category of B-type D-branes on a Calabi-Yau is the bounded derived category of coherent sheaves. This sits inside Kontsevich's 1994 Homological Mirror Symmetry conjecture, which predicts an equivalence
between the B-side category on and the Fukaya category on the mirror , trading complex geometry for symplectic geometry. For mathematicians, the conjecture was the first strong hint that the derived category was the structurally correct object on the algebraic side.
The key dictionary entry for our purposes:
Once you accept that the right object is , you can ask physical questions about which branes are stable — which actually exist as BPS states at a given point of moduli space. Douglas formalized this as -stability, with branes carrying a phase determined by the period of the holomorphic three-form. Bridgeland, in 2007, gave a clean mathematical version: a stability condition on any triangulated category. The Enriques surfaces we care about are not Calabi-Yau, but the formalism extends, and what started as a physics motivation for becomes an algebraic-geometric tool for studying Kuznetsov components.
6. Exceptional collections and the Kuznetsov component
Let be a generic (unnodal) complex Enriques surface with derived category . The goal here is to carve into pieces, isolating the component on which the final argument will run.
The cleanest pieces of any derived category are those generated by exceptional objects.
An object is exceptional if and for every . Equivalently, has no self-extensions and only scalar endomorphisms.
A short calculation shows that on an Enriques surface, every line bundle is exceptional. Given a line bundle , the self-Ext groups are
The first equality uses that on a smooth variety equals the cohomology of the bundle , which is the trivial bundle . The second equality just rewrites the trivial bundle as . The right-hand side is now exactly the cohomology Castelnuovo's criterion was about: for (global constants on a connected variety), zero for (since ), and zero for (since ). Every line bundle is exceptional.
What is special to the unnodal case is that one can find a particularly clean exceptional collection.
For a generic (unnodal) Enriques surface, there is a collection of ten line bundles on that is completely orthogonal: for every pair and every integer ,
The construction is lattice-theoretic. The Picard lattice of a generic Enriques surface is the rank- Enriques lattice , and one finds ten isotropic divisor classes with intersection numbers ; the line bundles built from these classes give the orthogonal collection. The vanishings for rest on Riemann–Roch and vanishing arguments that fail in the presence of -curves — this is exactly where the unnodal hypothesis enters.
The next piece of categorical scaffolding is the semiorthogonal decomposition.
A semiorthogonal decomposition is a sequence of full triangulated subcategories such that for , and is generated by the as a triangulated category.
With ten orthogonal exceptional line bundles, we get
where is everything left over.
The Kuznetsov component of a generic Enriques surface is the right orthogonal complement
Concretely, consists of complexes whose hypercohomology against every vanishes in every degree — the part of that does not see any of the ten chosen line bundles.
The numerical Grothendieck group $K_{\mathrm{num}}$
For a triangulated category , the numerical Grothendieck group is the quotient of the abstract Grothendieck group by the kernel of the Euler pairing For any admissible subcategory of the derived category of a smooth proper variety, this quotient is a finite-rank free abelian group — a fact going back to Bayer–Lahoz–Macri–Stellari and made explicit as Lemma 12.7 of Bayer–Lahoz–Macri–Nuer–Perry–Stellari (arXiv:1902.08184). In particular for an unnodal Enriques surface, sitting inside the rank- lattice as the orthogonal complement (under ) of the rank- sublattice spanned by . The torsion-freeness will turn out to be load-bearing in the contradiction of section 8. A further fact in the same vein: the Euler form restricted to is positive-definite of signature , computed in the Kuznetsov–Perry framework (see e.g.\ arXiv:1902.08184, Section 12, and the Enriques-specific analysis of Li–Pertusi–Zhao arXiv:2104.13610). This is what eventually forces to give : a lattice would admit hyperbolic involutions, but a positive-definite rank- lattice does not.
The rank of is therefore , sitting as the orthogonal complement of the rank- sublattice spanned by inside the rank- ambient lattice.
![A shelf diagram on a black background. Heading 'Semiorthogonal decomposition' with subtitle $D^b(X) = \\langle \\mathrm{Ku}(X), L_1, \\ldots, L_{10} \\rangle$ ($\\mathrm{Ku}(X)$ in amber). A wide deep-purple horizontal band labelled $D^b(X)$ sits across the top of the figure. Below it, eleven compartments are arranged left-to-right in the SOD-bracket order: one wider amber compartment on the LEFT labelled $\\mathrm{Ku}(X)$ with the annotation $\\mathsf{S}_{\\mathrm{Ku}}^2 \\cong \\Phi \\circ [4]$ inside, then ten muted-grey compartments $\\langle L_1 \\rangle, \\langle L_2 \\rangle, \\ldots, \\langle L_{10} \\rangle$ to the right. Eleven projection arrows drop from the bottom edge of the band to each compartment — the leftmost amber arrow labelled $\\zeta_K^!$ lands on $\\mathrm{Ku}(X)$, and the ten white arrows labelled $\\pi_i$ ($i = 1, \\ldots, 10$) land on the line-bundle slots. Beneath each compartment, a small Serre-functor annotation: $\\mathsf{S}_{\\mathrm{Ku}}^2 \\cong \\Phi \\circ [4]$ for $\\mathrm{Ku}(X)$, $\\mathsf{S} = [2]$ for each $\\langle L_i \\rangle$. A numerical-rank row reads $\\mathrm{rk} = 2$ under $\\mathrm{Ku}(X)$ and $\\mathrm{rk} = 1$ under each line bundle, with the totals row $10 \\cdot 1 + 2 = 12 = \\mathrm{rk}\\, K_{\\mathrm{num}}(D^b(X))$ centred below. Bottom unifier banner: 'Ten CY-2 line-bundle slots $\\langle L_i \\rangle \\simeq D^b(\\mathrm{pt})$ + one Enriques-type $\\mathrm{Ku}(X)$ with $\\mathsf{S}_{\\mathrm{Ku}}^2 \\cong \\Phi \\circ [4]$', with $\\mathrm{Ku}(X)$ and $\\mathsf{S}_{\\mathrm{Ku}}^2 \\cong \\Phi \\circ [4]$ in amber.](/_next/image?url=%2Fimages%2Fposts%2Fenriques-kuznetsov-stability%2FSodShelf.png&w=3840&q=75)
The semiorthogonal decomposition as a shelf. The ten muted-grey slots are — each is a CY-2 component with trivial Serre functor . The single amber slot is , the rank- Enriques-type component with intrinsic Serre square , where is a non-trivial mutation autoequivalence acting trivially on but not on the category itself — the algebraic remnant of the two-torsion canonical bundle. The asymmetry that drives the contradiction at the end of the article is more delicate than "" vs "": even though acts trivially on numerical classes, is not categorically equal to the identity, and the gap between numerical triviality and categorical non-triviality is exactly what the explicit projected-point computation in Section 8 measures.
Because each is admissible, the inclusion has both a left and a right adjoint. The right adjoint, the projection functor
kills the line-bundle part. For , the unit of adjunction fits into a triangle
so is the natural way to manufacture objects of out of objects of the ambient .
We will frequently abbreviate as when the indexing is clear from context.
Let be admissible with right orthogonal . The right adjoint of the inclusion equals the right mutation through the orthogonal collection, computed objectwise as the cone on the evaluation On objects already in , the right mutation is the identity. The intrinsic Serre functor of the admissible subcategory is .
The standard reference is Bondal–Kapranov's 1989 paper on Representable functors, Serre functors, and mutations; modern proofs and extensions can be found in Kuznetsov's arXiv:0711.1734 §2 and arXiv:1509.07657 Lemma 2.8. From here we use and interchangeably whenever objects already lie in .
The Serre functor of the ambient category restricts and projects to give the intrinsic Serre functor of :
Squaring this functor in the ambient kills the torsion in , giving . The intrinsic Serre square on is more delicate — it equals only after composing with a non-trivial mutation autoequivalence:
The autoequivalence acts as the identity on (because is two-torsion in Picard, so acts trivially on numerical classes, and right mutation through an orthogonal collection is the identity on its own orthogonal complement). But is not isomorphic to the identity functor: the line bundles and are non-isomorphic objects of , so the two mutations being composed run through different full subcategories. The gap between numerical triviality of and its categorical non-triviality is exactly what Section 8 will exploit.
The Kuznetsov component is not strictly Calabi–Yau (a CY-2 category satisfies ), but its Serre functor squares to a shift up to the residual mutation autoequivalence . Categories with this structure are called Enriques-type categories in the Kuznetsov–Perry framework. The non-triviality of — the fact that it is not literally , even after squaring — is the algebraic remnant of the two-torsion of , and it is what generates the obstruction in the next two sections.
One more object is needed. There is a recipe that produces 3-spherical objects in from line bundles outside the orthogonal collection. The notion of an -spherical object is due to Seidel and Thomas, and it requires two conditions — a Calabi-Yau- condition on the Serre functor, and a constraint on the endomorphism algebra that identifies it (as a graded vector space) with the singular cohomology of the -sphere.
Let be a -linear triangulated category with Serre functor , and fix an integer . An object is -spherical if it satisfies both:
-
Endomorphism algebra. The graded -algebra of is isomorphic, as a graded -vector space, to the singular cohomology of the -sphere: Concretely, , , and for .
-
Calabi-Yau- condition. .
The case — a 3-spherical object — is the one relevant to .
For each , the projection is a nonzero 3-spherical object: it satisfies and (i.e., , all other vanish). Moreover the are pairwise orthogonal: for .
See arXiv:1912.04332 for the proof. One ingredient deserves to be stated separately, since it is the precise place where unnodality enters the spherical-object construction:
Let be an unnodal complex Enriques surface and the Zube exceptional collection. Then for all and every ,
This strengthens Zube's orthogonality by also vanishing the -twisted Ext groups; nodality (the existence of a -curve) would obstruct the underlying Riemann–Roch + vanishing argument and the off-diagonal twisted Exts would generically be nonzero. Section 8 leans on this lemma to kill the cross terms in a line-bundle Hom computation.
The algebraic Mukai lattice and $\mathrm{ch}(\omega_X) = 1$
The numerical Grothendieck group for an Enriques surface is naturally identified with the algebraic Mukai lattice where is the fundamental class. The Mukai vector realises the isomorphism (see Nuer, arXiv:1406.0908). Because is two-torsion in , its first Chern class is killed in the torsion-free quotient , and consequently the entire Chern character collapses: So tensoring by acts as the identity on — even though is a non-trivial autoequivalence of . This numerical-vs-categorical asymmetry is the structural fact that makes Enriques surfaces categorically distinctive.
7. Bridgeland stability conditions
The reason this notion exists in the first place is physics. Section 5 explained why D-branes on a Calabi–Yau live in ; the next question, the one that drove the subject in the late 1990s, was: which of those objects actually exist as physical states? Not all of them. A D-brane wrapping a cycle has a mass; for the brane to be a stable particle in the four-dimensional effective theory, that mass has to be locked in place by the supersymmetry algebra, not just by dynamics. The objects for which this happens are the BPS states, and the algebra of stability conditions is the language that catches them.
In type II string theory compactified on a Calabi–Yau threefold, the resulting four-dimensional theory has supersymmetry — eight supercharges, with a complex central charge extending the algebra and depending on the charge of the state. On the IIB side is the period of the holomorphic three-form over a 3-cycle; on the IIA side is built from the complexified Kähler class together with the brane charge. Either way, a representation-theoretic calculation gives the BPS bound
with equality on short multiplets. The states that saturate this bound — annihilated by half of the supercharges — are the BPS states. They cannot decay into lighter states of the same total charge because the bound forbids it; their stability is built into the algebra rather than the dynamics.
Bound states obey a triangle inequality. If a BPS state of charge is composed of constituents of charges , the central charge is additive but the mass is sub-additive:
with equality precisely when the two phases align. The deficit between the two sides is the binding energy. As the moduli of vary — Kähler class on the IIA side, complex structure on IIB — the central charges rotate in , and across real-codimension-one walls of marginal stability their phases align. On one side of the wall the bound state is BPS; on the other it has decayed into its constituents. The natural angular variable to track is the BPS phase , and the discontinuous reorganization of the spectrum across walls is the phenomenon called wall-crossing.
Michael Douglas, in a sequence of papers culminating in his ICM 2002 lecture, translated this picture into the language of triangulated categories. A distinguished triangle in describes as a tachyon condensation bound state of and . The state is -stable (the stands for period) when, for every such triangle with nonzero, the BPS phases satisfy
This single inequality re-encodes the mass-deficit picture entirely: a sub-brane of smaller phase contributes mass that locks into the sum constructively, leaving binding energy on the table; if the phases ever cross, the bond breaks. -stability varies continuously across the Kähler moduli space, the spectrum jumps at walls, and the worldvolume gauge theory on undergoes a corresponding change of quiver and superpotential.
Bridgeland's 2007 axiomatization is the rigorous mathematical version. The dictionary is exact: the heart of a bounded t-structure is the categorical incarnation of "which objects count as particles versus antiparticles" at a given point of moduli space; the central charge is a linear function on the Grothendieck group, realized for Calabi–Yau examples by the same period integrals that appear in the physics; the phase is the BPS phase; the Harder–Narasimhan filtration is the unique decomposition of any object into elementary semistable factors of strictly decreasing phase, mathematically formalizing the existence of a well-defined BPS spectrum; and the support property is what makes the moduli space of stability conditions — denoted — a complex manifold rather than a wild set, so that one can deform continuously in the way the physical Kähler moduli demand. Conjecturally, a connected component of the space is the universal cover of the stringy Kähler moduli space of — the moduli that string theory says is the true parameter space for the B-model. Donaldson–Thomas invariants count -semistable objects and recover BPS state counts; the Kontsevich–Soibelman wall-crossing formula matches the physical spectrum jumps to the categorical operations of tilting a heart at a torsion pair.
With the physical picture as backdrop, we now state the axioms for a triangulated category — applied throughout to , but everything generalizes.
A stability condition on is the data of:
- The heart of a bounded t-structure (an abelian subcategory).
- A central charge , a group homomorphism on the Grothendieck group, satisfying:
- Positivity. For every nonzero , .
- Existence of Harder–Narasimhan Filtrations. Every nonzero admits a unique filtration with semistable factors of strictly decreasing phases .
For nonzero , the phase is
The phase is the angular position of in the upper half-plane, normalized so that the negative real axis sits at . An object is -semistable if for every proper subobject in .
The Harder–Narasimhan filtration extends the phase to objects of the full triangulated category , not just the heart. For any nonzero , there is a uniquely determined filtration whose factors are semistable with strictly decreasing phases; the largest phase appearing is and the smallest is — and it is that will eventually produce a contradiction.
There is an equivalent reformulation in terms of slicings. A slicing assigns to each real number the abelian subcategory of semistable objects of phase , satisfying and for . The slicing and heart formulations are equivalent, with the heart recovered as .
The geometry of a Bridgeland stability condition. The central charge sends each nonzero object of the heart to a point in the upper half-plane , and the normalised argument is its angular coordinate — at the positive real axis, at the negative real axis, with the shift acting by (rotating the whole rainbow by ). Four objects are placed at distinct phases; the coral pair and illustrate the spread of an Harder–Narasimhan filtration whose semistable factors realise both extremes. Semistability of is then the bound for every proper subobject — a literal angular constraint in this picture.
The universal cover of a slicing, drawn as a helicoid . Each half-revolution is one heart ; the homological shift acts by , climbing one sheet of the helicoid and swapping the two colors. The relation is the periodicity that lifts the upper half-plane to its universal cover — and that periodicity is what the helicoid makes visible.
Fix a finite-rank lattice and a surjection . The space of stability conditions whose central charge factors through and which satisfy the support property carries a natural complex manifold structure such that the forgetful map is a local biholomorphism onto .
The support property — a quadratic-form condition due to Kontsevich and Soibelman, equivalent to the bound for all semistable — upgrades local injectivity to local biholomorphism. We treat it as part of the definition.
The space carries a right action of , the universal cover of the orientation-preserving general linear group on . An element of is a pair where is a real matrix with positive determinant, and is an increasing function with , compatible with the action of on the unit circle. The action on a stability condition is
So shears the central charge as a real-linear map and relabels phases. The shift functor takes the slicing to and multiplies by (since on ), corresponding to the universal-cover element .
There is also a left action of . For an autoequivalence ,
The Serre functor is one such autoequivalence. The two actions commute, and the natural compatibility one can ask between and is that the left action of lies in the same -orbit as .
A stability condition is Serre-invariant if there exists with .
Serre-invariant stability conditions exist on many Kuznetsov components — cubic threefolds, cubic fourfolds, Gushel–Mukai threefolds and fourfolds — and where they exist they are essentially unique up to the -action; this near-uniqueness is what makes them so powerful for moduli theory. The question is whether any exist on for a generic Enriques surface.
8. The contradiction
The argument runs by contradiction. Suppose is a Serre-invariant Bridgeland stability condition on , so there exists a cover element realising
The plan is to extract enough information from this single relation, combined with the explicit categorical structure of , to produce a numerical impossibility — a class that must equal both and in a torsion-free lattice.
8.1. Recasting as
The intrinsic Serre functor of is given, by the standard formula for the Serre functor of an admissible subcategory (), as
where denotes right mutation through the orthogonal collection . Before iterating, we record a small conjugation identity for right mutations through a twisted orthogonal collection. Since is an autoequivalence of that carries the orthogonal collection to , conjugating the unit triangle for right mutation by this autoequivalence gives
as functors . Using (forced by ), evaluating on an object rearranges to
Now iterate the Serre formula. Applying twice and pulling out the shifts,
The conjugation identity, applied with , identifies the inner expression with . Substituting,
The autoequivalence is a composition of two right mutations through different orthogonal collections — the original one and its -twist. Although the individual classes and coincide in the numerical Grothendieck group (the canonical bundle is two-torsion in ), the full subcategories and are genuinely different inside because the line bundles and are not isomorphic as objects. So is a non-trivial autoequivalence of — and on a generic test object it will turn out to be not isomorphic to the shift .
8.2. acts trivially on
Both ingredients of — the outer mutation and the inner mutation — act as the identity on the numerical Grothendieck group . The argument has two parts.
First, the tensor acts on via multiplication by the Chern character . Since is two-torsion in , its first Chern class vanishes in , and so in the algebraic cohomology lattice (this is the Mukai-lattice computation at the end of Section 6). Hence tensoring by is the identity on numerical classes; in particular in for each .
Second — and this is what handles the inner mutation — the equality implies that the two sublattices and are literally equal inside . Their Euler-pairing orthogonal complements therefore coincide as well, so the two right mutations and induce the same numerical projection — orthogonal projection onto . Restricted to classes already in , both projections are the identity.
Taking the composition, acts as the identity on . Consequently the squared Serre functor also acts trivially on , since the shift acts as on numerical classes.
8.3. The cover-element matrix is
Squaring the Serre-invariance relation:
The action on the central charge is . But acts as the identity on , so as linear maps. Since is a rank- lattice (positive-definite under , so signature — as established in the Aside in Section 6) and identifies :
(Reflections, which also satisfy , have and are excluded by the orientation-preserving constraint .)
To choose between the two branches, apply the cover-element relation to one of the 3-spherical objects from Section 6. Each has well-defined upper and lower Harder–Narasimhan phases (these exist for any nonzero object under any Bridgeland stability condition), and the cover-element relation gives
using from the previous section and the fact that the homological shift adds exactly to every phase in the Harder–Narasimhan filtration. Combine with the two cases for :
- Case . The lifts of the identity to are translations by even integers — namely for (these are the powers of ). The constraint has no integer solution. Excluded.
- Case . The lifts of are translations by odd integers — for (odd powers of the shift ). The constraint gives , hence .
So and uniformly on the universal cover. The numerical consequence — the Serre sign relation — follows immediately: acting on the central charge via gives, by injectivity of on — a consequence of Bridgeland's support property, which forces to be a real isomorphism on the rank- lattice (see Bayer–Macri–Stellari, arXiv:1410.1934) —
This sign relation is the constraint we will violate.
8.4. The test object — the projected point
To produce a contradiction we exhibit a single object on which the Serre sign relation fails by direct categorical computation. The natural candidate is the right-adjoint projection of a generic skyscraper sheaf:
For a generic smooth point , set .
The right-projection unit triangle for reads
The Hom-spaces are computed via Serre duality on (with Serre functor ):
Since is a skyscraper at a smooth point, the depth- Koszul resolution of at (a regular local ring of dimension 2) gives — the right-hand side is concentrated in degree 2 with dimension 1. Dualising:
The unit triangle therefore simplifies to
Each component surjects onto the fibre , so the global evaluation is surjective and the long exact sequence in cohomology gives
The kernel sheaf is locally free of rank on (where vanishes, so the kernel of equals itself) and torsion-free of rank at — the kernel of a rank- free -module surjecting onto the residue field . Globally, is a torsion-free sheaf of rank . In short:
Its class in the numerical lattice is
the orthogonal projection of the point class onto . The rank component of is (zero from the skyscraper minus ten from the line bundles), so in the rank- lattice — this non-vanishing will drive the contradiction.
8.5. Computing — the two-degree spread
By the formula for the intrinsic Serre,
Tensor the unit triangle for by , using (the canonical bundle trivialises locally at any smooth point):
To right-mutate through , compute . By the tensor-Hom adjunction for an invertible sheaf , applied with and using (the canonical bundle is its own inverse, since ):
Apply to the unit triangle for :
The two anchor terms:
- Line-bundle term. For , the unnodality hypothesis (Li–Nuer–Stellari–Zhao Lemma 4.4) gives for all , dualised via Serre duality on to . For ,
where the last identification uses the Enriques cohomology of the canonical bundle, computed via Serre duality on : (equivalently, and ), by Serre duality on , and likewise.
- Skyscraper term. , concentrated in degree 0 — the same evaluation calculation as in the unit triangle.
The connecting morphism in corresponds to a class in , hence vanishes. The triangle therefore splits, giving
The mutation source then takes the explicit form
Plugging into the right-mutation triangle and writing for brevity (note: is not the global autoequivalence of §8.1 applied to — it is only the right-mutation through of , missing the inner mutation through ):
The long exact sequence in cohomology — using that the source has and , while the target has and zero in all other degrees — yields a short exact sequence describing :
together with
Writing for the rank- extension (rank from plus rank from ), and shifting by :
with cohomology
and zero in all other degrees.
The cohomology of is concentrated in two adjacent degrees, with sheaves of substantially different geometric character — has rank with a torsion defect at (inherited from the -summand), while is locally free of rank everywhere on . This two-degree categorical signature is the explicit witness to the non-uniformity of that the Serre sign relation cannot accommodate.
8.6. The numerical contradiction
Compute the class of in via the alternating sum over cohomology sheaves — the standard recipe for converting a complex into a class in :
The short exact sequence makes additive in , and in (since on the algebraic Mukai lattice, by the same argument as in Section 8.2). Substituting:
where the final equality is the class identity from Section 8.4 ( shifts the class by a sign), and now both sides are bona fide classes in since . But the Serre sign relation derived in Section 8.3 demands
Equating the two values:
The numerical Grothendieck group is a finite-rank free abelian group — this is a standard structural fact for the numerical Grothendieck group of any admissible subcategory of the derived category of a smooth projective variety, going back to Bayer–Lahoz–Macri–Stellari and made explicit in Lemma 12.7 of Bayer–Lahoz–Macri–Nuer–Perry–Stellari. Concretely, , generated by classes such as and , where denotes orthogonal projection onto .
Since is torsion-free, the relation forces . To see that this is impossible, view through the inclusion — injective because the semiorthogonal decomposition induces a direct-sum decomposition of . The image is , whose rank component is . So in , hence in . Contradiction.
Let be a generic (unnodal) complex Enriques surface, and let be its Kuznetsov component. Then admits no Serre-invariant Bridgeland stability condition.
Assume, for contradiction, that is Serre-invariant with cover element . The squared relation together with the triviality of on forces , hence . The 3-spherical objects with pin and , with numerical consequence for every .
Applied to the projected point : the unit triangle exhibits where is the rank- kernel sheaf with . Iterating the formula and evaluating the relevant Hom-spaces via Serre duality and the unnodal Lemma 4.4, the cohomology of is concentrated in degrees and , equal to a rank- extension and to respectively. The alternating-sum recipe in gives , while the cover-element analysis demands . These two values agree only if in the torsion-free lattice , contradicting the nonvanishing rank component of .
Two remarks. First, unnodality is essential — not merely a technical convenience: if contains a -curve, the orthogonal collection fails to be completely orthogonal, the projection becomes more delicate, the Lemma-4.4 vanishings used in computing break down, and the 3-spherical objects that pin the cover-element matrix need not be available. The non-existence statement holds in the unnodal locus; for nodal Enriques surfaces, an analogous non-existence is conjectured but not yet established (see the discussion in the introduction of Li–Pertusi–Zhao, arXiv:2104.13610).
Second, the obstruction is Serre-invariance specifically, not the existence of stability conditions outright. Bridgeland stability conditions on the ambient category for Enriques surfaces are known to exist (Bayer–Macri–Stellari); whether they exist on for unnodal is conjecturally false and remains open. What we have ruled out here is the natural compatibility with Serre duality that, for cubic threefolds, cubic fourfolds, and Gushel–Mukai cases, has driven recent moduli-of-sheaves geometry. The Enriques case is genuinely different: the two-torsion of — the same algebraic feature that distinguishes Enriques surfaces from K3 surfaces in the Kodaira classification — reaches into the categorical structure of via the non-trivial mutation autoequivalence , and prevents any choice of stability that would treat Serre duality symmetrically.
Comments